深圳先进院发表柔性微创手术机器人研究进展综述
近日,中国科学院深圳先进技术研究院院微创中心王磊研究员团队围绕灵巧型手术机器人的研发路线和蛇形手术机器人的设计机理进行深入调研,取得了新进展。调研结果发表在IEEE Transactions on Systems, Man, and Cybernetics: Systems(中科院一区期刊,影响因子:9.3)上,标题为A Review on Flexible Robotic Systems for Minimally Invasive Surgery。博士后Olatunji Omisore是本文第一作者,李晖副研究员和熊璟高级工程师是共同作者,王磊研究员是通讯作者,深圳先进院是第一通讯单位。
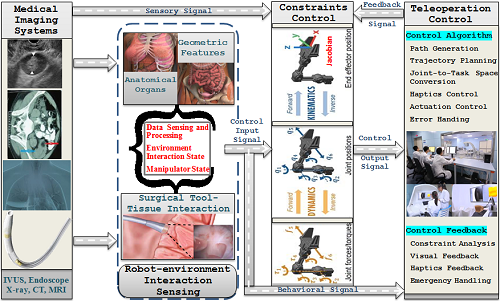
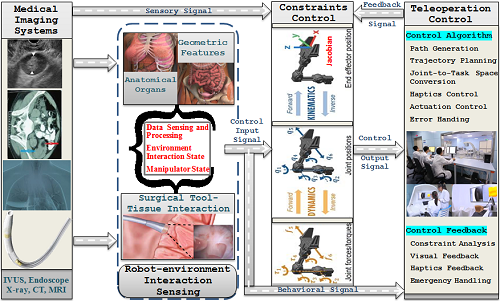
手术机器人有着广阔的发展前景,但由于缺乏有效的机器人运动控制和远端操作约束方案,具有蛇形冗余或连续体结构的柔性/软体系统的临床应用仍然受到很大限制。本文回顾了相关机器人系统的技术发展趋势,归纳了近年来微创手术用柔性机器人的主要研发进展,针对系统设计、驱动策略和控制模型中的核心原则进行了深入分析,并在此基础上提出了一种适用于柔性微创手术机器人的通用框架(下图)。
柔性/软体系统是微创手术机器人的一个重要发展方向,本文在导航建模与控制、人机交互、远端操作与反馈系统、手术任务自动化等方面的调研将为相关领域的进一步研究提供有益参考。
研究成果得到国家自然科学基金机器人联合基金(U1713219)、国家自然科学基金优秀外籍青年基金(61950410618)、国家重点研发计划(2019YFB1311702)和中科院院长国际奖学金的资助。
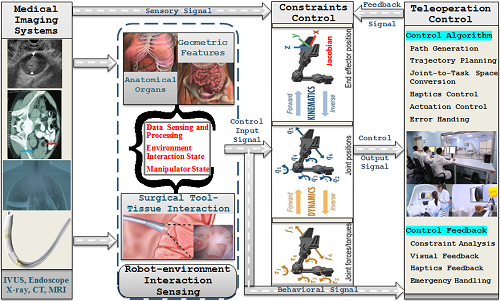
柔性微创手术机器人的通用控制模型